
 PDF
PDF
Published
2023-06-28
Section
Articles
How to Cite
Path Planning and Obstacle Avoidance in Dynamic Environments for Cleaning Robots
Shivansh Khanna
Tennant Company, Minneapolis, MN
Shraddha Srivastava
Credit One Bank, Las Vegas, NV
Keywords: Dynamic Path Generation, Obstacle Avoidance, Neural Network Models, Autonomous Cleaning Robots, Real-Time Sensor Data, Path Planning Algorithms, Environmental Adaptability
Abstract
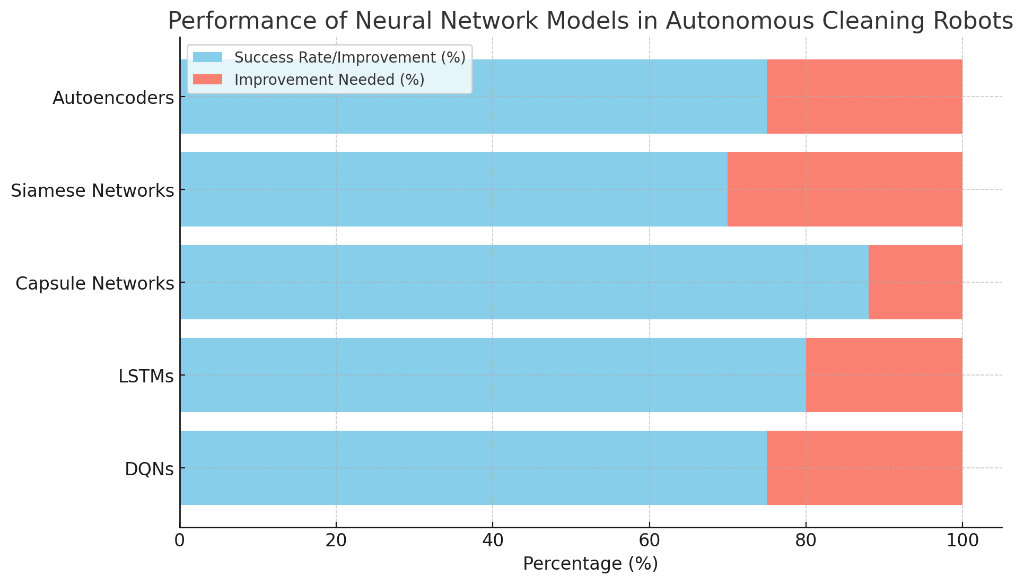
Traditional cleaning robots often rely on predetermined paths and struggle to adapt to changes in their environment, leading to incomplete cleaning, repeated cleaning of the same area, or even collisions with obstacles. This research aims to address these limitations by presenting an architecture designed to enhance path planning and obstacle avoidance in dynamic environments using advanced path planning algorithms and neural network models. The proposed architecture comprises four main components: dynamic path generation, algorithm-based initial path creation, neural network models for path optimization, and a performance evaluation. Dynamic Path Generation forms the first part of the architecture, using real-time data from robot sensors to continuously calculate efficient cleaning paths, rather than relying on pre-defined waypoints. This approach improved area coverage by 8% and had an 80% success rate in avoiding dynamic obstacles. The initial paths are created using three algorithms: the A* Algorithm, suitable for grid-like environments, the Dynamic Window Approach (DWA), effective in real-time obstacle avoidance, and Artificial Potential Fields, which maneuver around obstacles using virtual forces. The DWA notably reduced collision incidents by 20% in high-traffic areas, and the Artificial Potential Fields enhanced smooth navigation around obstacles by 15%. For path optimization, five neural network models were employed: Deep Q-Networks (DQN), Long Short-Term Memory Networks (LSTMs), Capsule Networks, Siamese Networks, and Autoencoders. DQNs demonstrated a 75% success rate in optimal path selection, LSTMs reduced re-cleaning of areas by 20%, Capsule Networks improved path prediction accuracy by 12%, Siamese Networks had a 70% success rate in adapting to similar room layouts, and Autoencoders simplified path planning computations by 25%. The performance of each neural network algorithm was evaluated based on training time, efficiency, and total path distance. The results indicate the good performance of this approach in improving the efficiency and effectiveness of cleaning robots in dynamic environments.
